


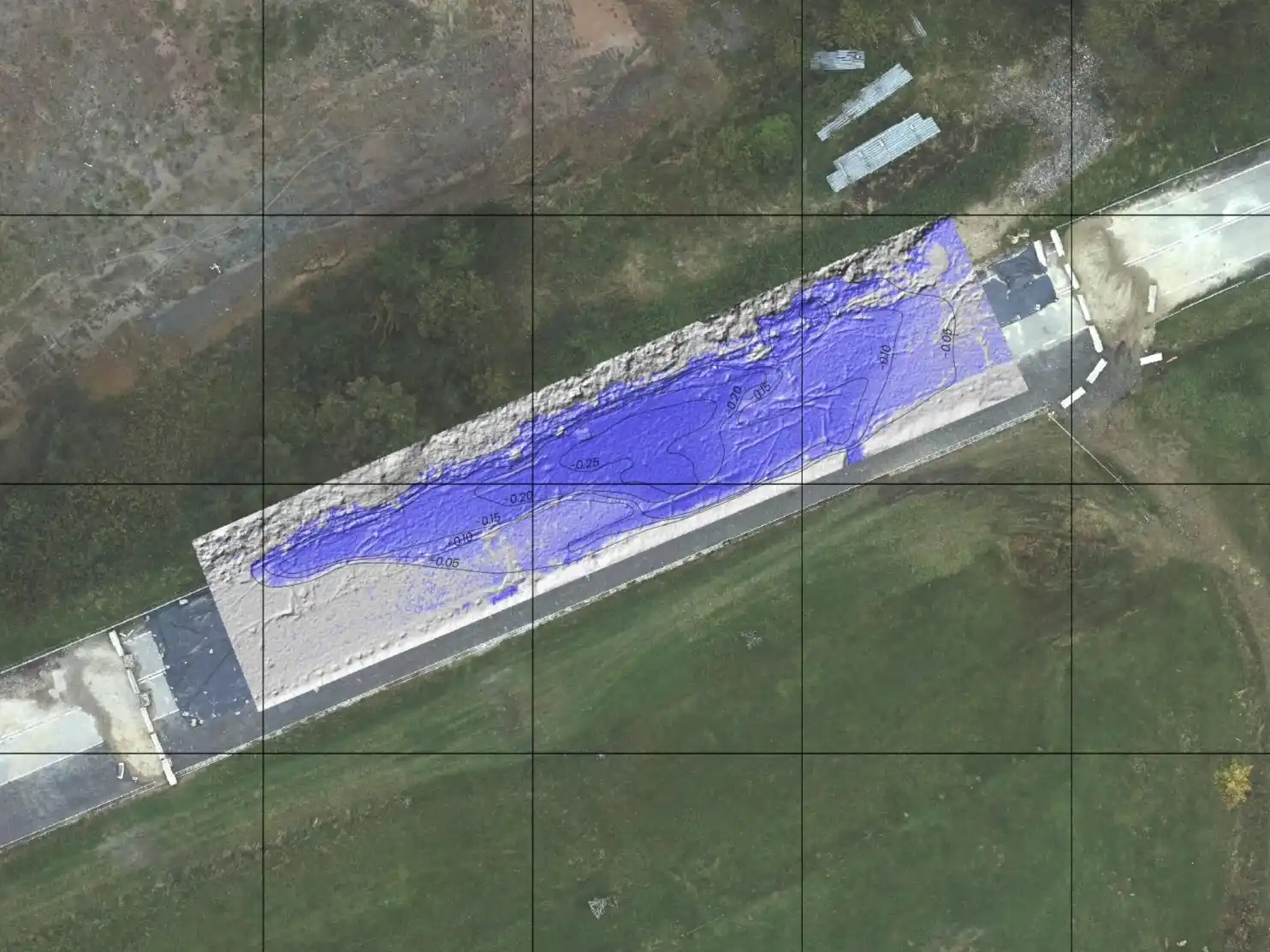




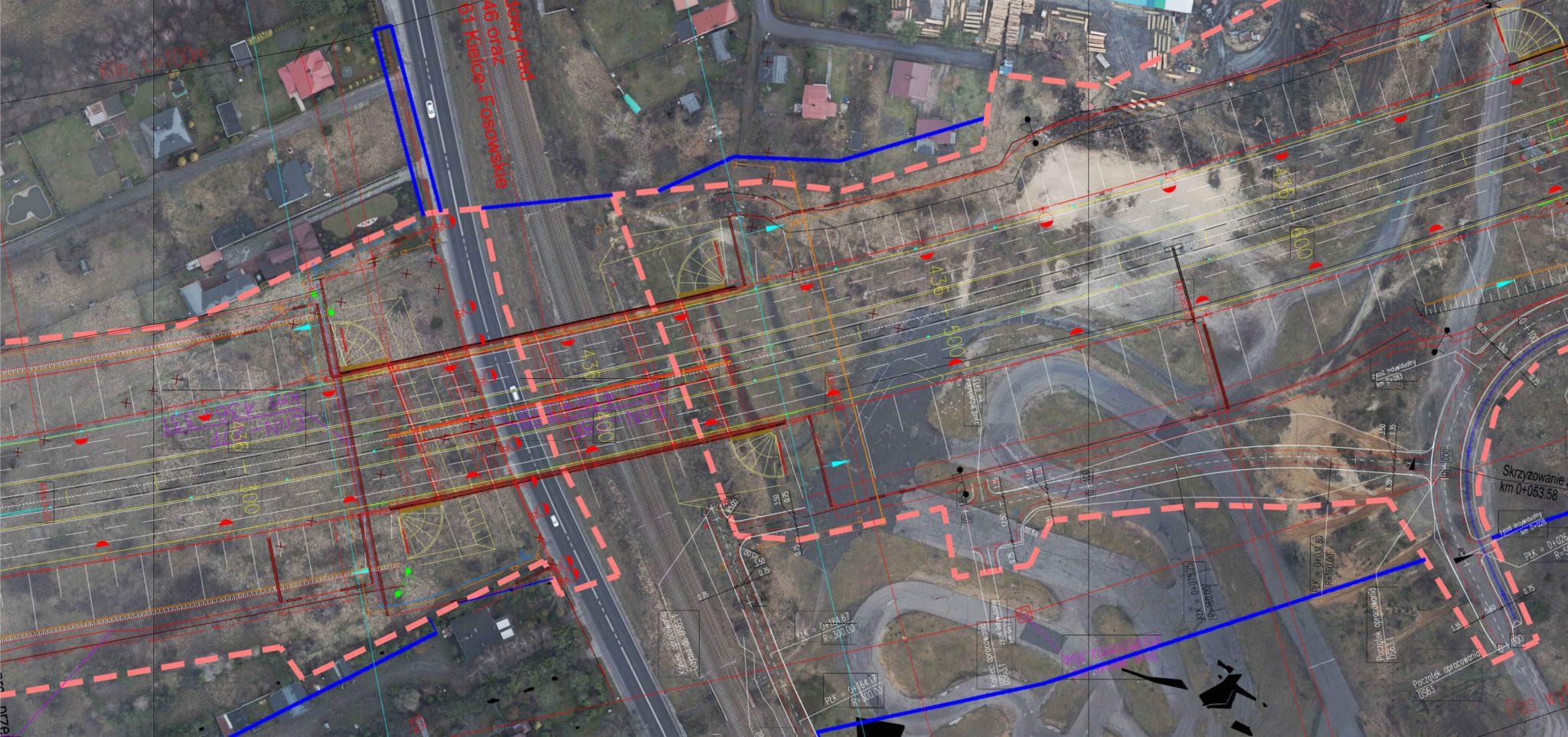
Budowa dróg – inwentaryzacja z drona
Realizujemy geodezyjną obsługę inwestycji drogowych. Nowoczesna flota. Sprawdź.
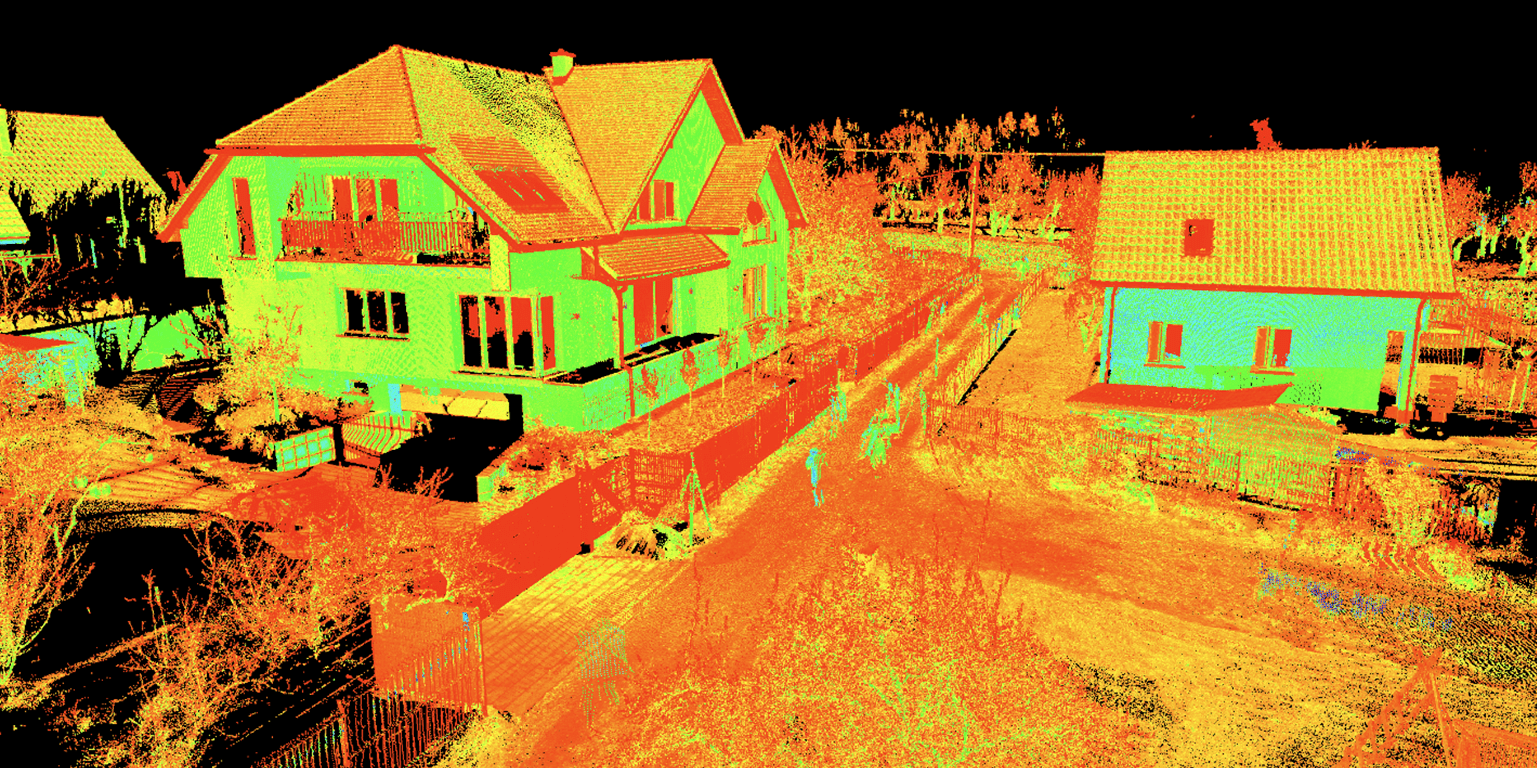
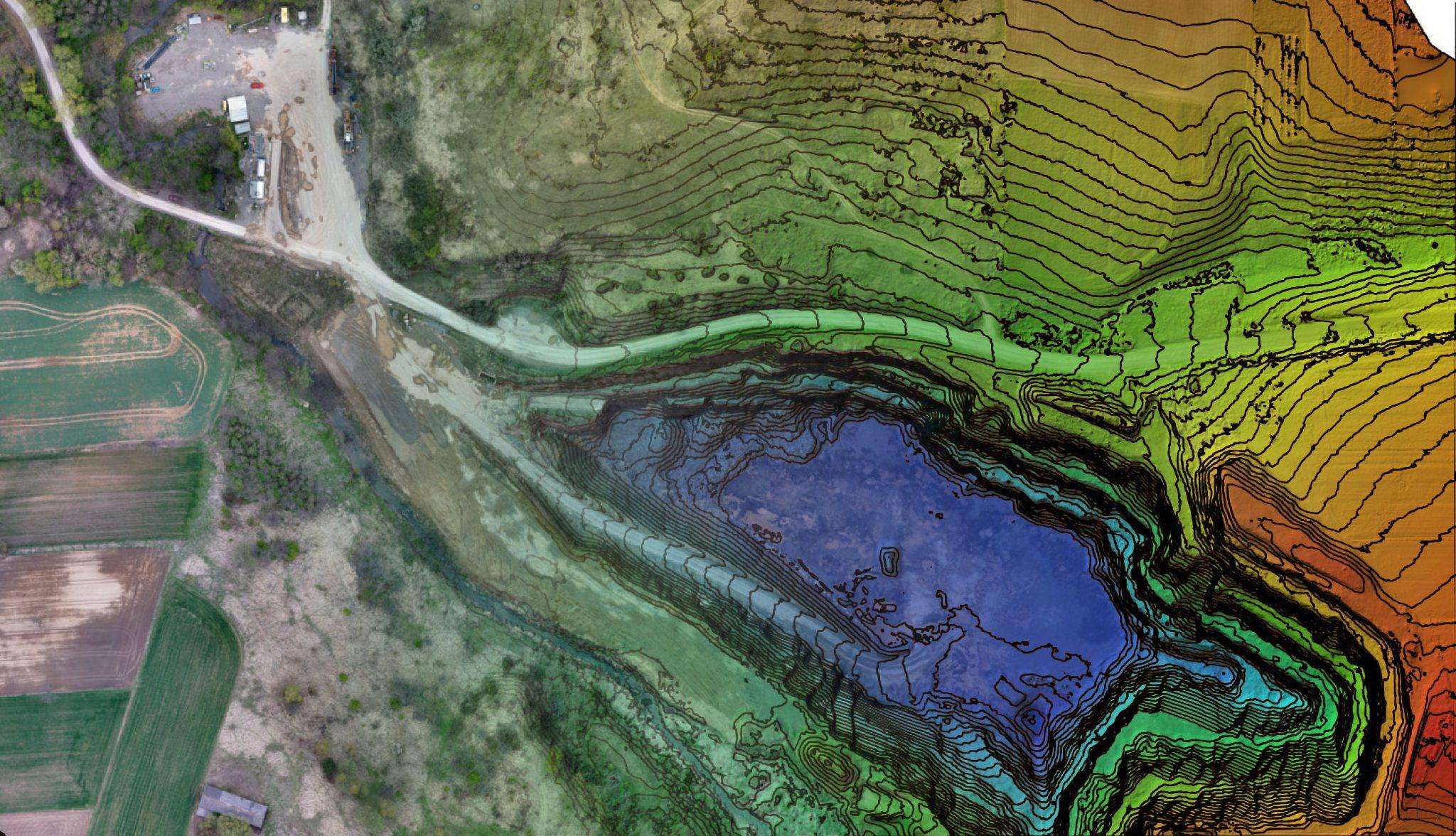
Poznaj nasz zespół geodetów, którzy łączą wiedzę i praktykę z nowoczesnymi technologiami pomiarowymi. Wykonujemy pomiary geodezyjne, korzystając m.in. z dronów, skanerów laserowych, tachmietrów i odbiorników GPS, by zapewnić najwyższą jakość danych przestrzennych. Jesteśmy pionierami wykorzystania dronów w geodezji, których używamy od 2015 roku.
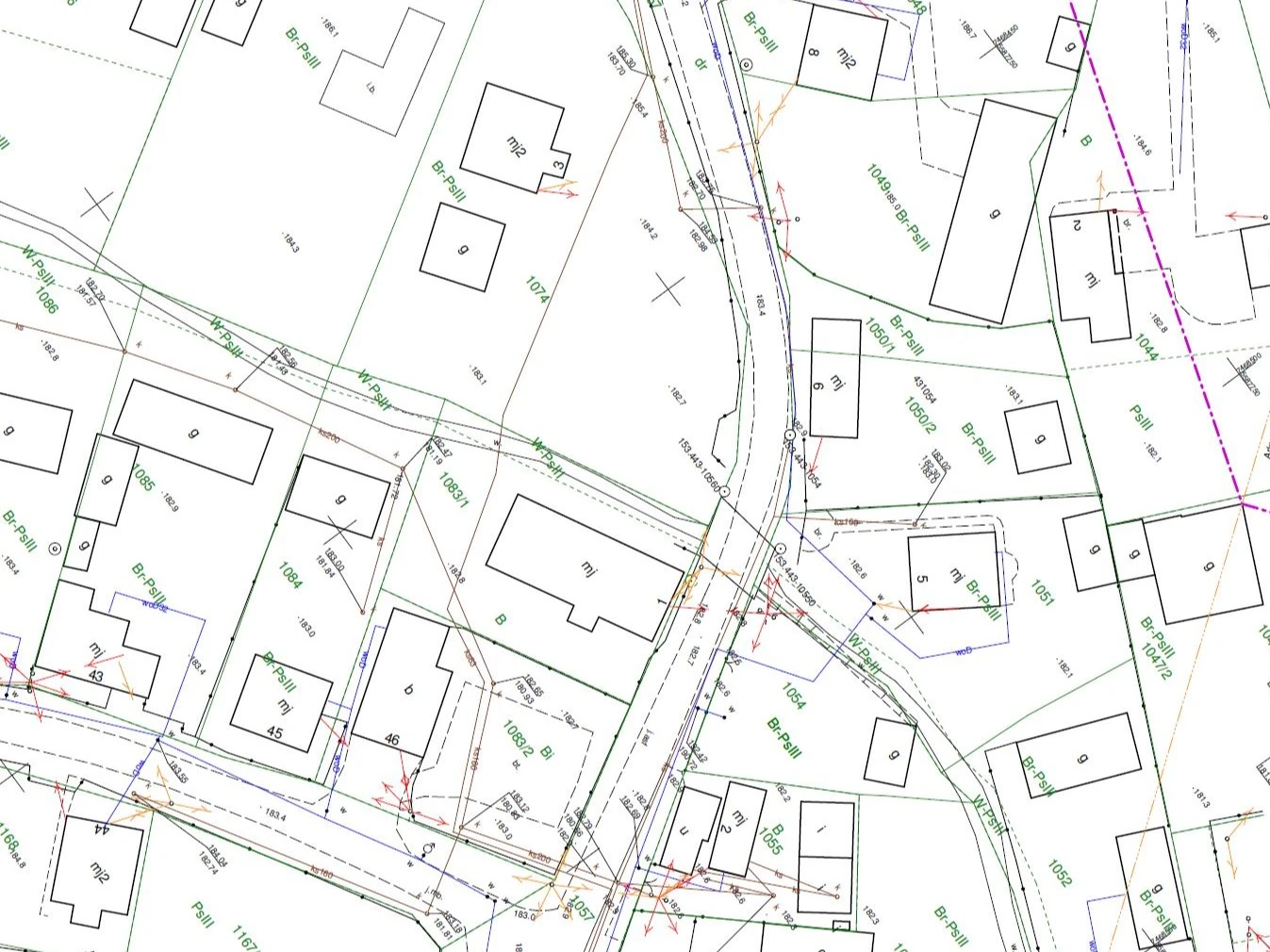
Działamy na terenie całej Polski, realizując zlecenia z zakresu geodezji prawnej, inżynieryjnej, górniczej i modelowania 3D.
Stale inwestujemy w nowoczesne technologie geodezyjne, dzięki czemu oferujemy dokładne i precyzyjne pomiary terenowe. Korzystamy z najnowszych rozwiązań, aby zapewnić produkt dopasowany do potrzeb naszych klientów oraz zgodność wyników z obowiązującymi normami i standardami branżowymi.
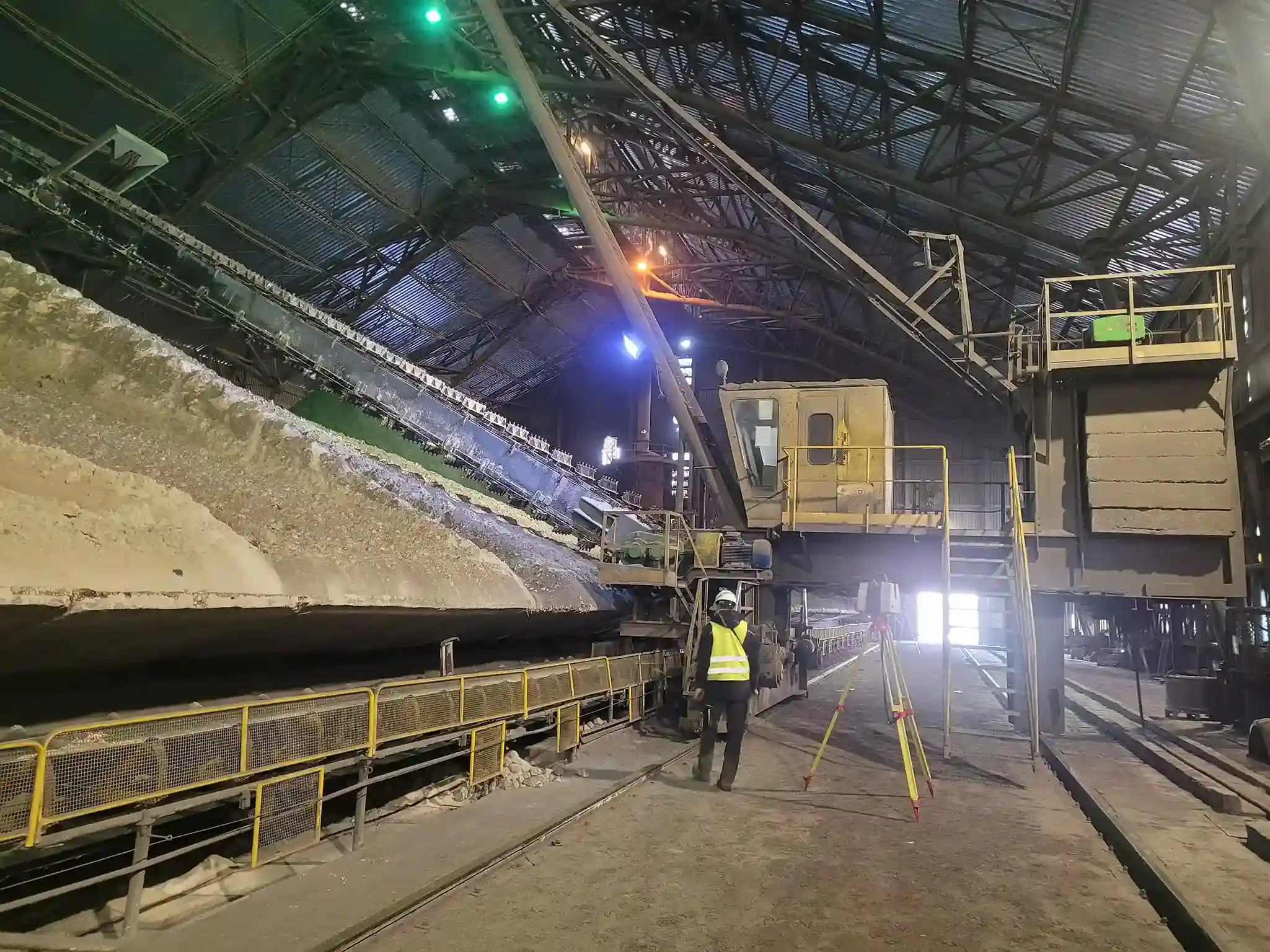
Pracujemy przy wymagających projektach inwestycyjnych, m.in. w branży górniczej czy przy budowie dróg. Zobacz przykłady naszych działań.

Realizujemy geodezyjną obsługę inwestycji drogowych. Nowoczesna flota. Sprawdź.
Dostarczamy pełne opracowania geodezyjne. Twoi pracownicy nie muszą iść w teren.

Szukasz wykonawcy profesjonalnej ortofotomapy? Zobacz, na co zwrócić uwagę.

Wykonujemy opracowania geodezyjne. Zobacz, co jest ważne by były one w pełni wartościowe.


Zaawansowane technologie pozwalają na dokładne pomiary w kopalniach i na terenach górniczych. Sprawdź






















Porozmawiajmy o Twoim projekcie.
Napisz do nas: biuro@colidrone.pl