Fotopunkt
Ortofotomapa, fotomapa, fotoplan, mapa fotograficzna – kartograficzne opracowanie, przedstawiające wybrany obszar (głównie powierzchni Ziemi) za pomocą przetworzonych, lotniczych zdjęć fotograficznych, w odniesieniu do wybranego układu współrzędnych.
Aby mogła powstać ortofotomapa, muszą zostać spełnione ściśle określone warunki, którymi rządzi się fotogrametria. Coraz popularniejszym narzędziem stosowanym w fotogrametrii są bezzałogowe statki powietrzne (BSP, UAV, popularne „drony”).
Pierwszym etapem jest projektowanie misji fotogrametrycznej. Należy uwzględnić zasięg posiadanego UAV, sensor, w jaki jest on wyposażony (głównie wielkość matrycy i parametry obiektywu), żądany piksel terenowy oraz pokrycie podłużne i poprzeczne wykonywanych zdjęć.
Zakres opracowania wyznacza dobór drona: w przypadku małych obszarów (pojedynczych hałd czy zwałowisk) korzystniej jest wybrać wielowirnikowiec, gdyż praktycznie nie występują tu ograniczenia związane z doborem miejsca startu i lądowania; w przypadku dużych obszarów lepiej wybrać płatowiec ze względu na zasięg lotu.

Bezzałogowy System Fotogrametryczny Fenix
Następnie należy dobrać odpowiednią kamerę. Im większa matryca, tym opracowanie będzie bardziej szczegółowe (piksel terenowy będzie mniejszy), a lot będzie trwał krócej. Bardzo ważny jest wybór obiektywu. Z zależności matematycznych wynika wprost, że przy większych deniwelacjach terenu lepszy będzie „ostry” obiektyw, tzn. taki, którego ogniskowa jest dłuższa (f>40mm). Na płaskim terenie ogniskowa może być krótsza. Wybór sensora (matrycy) oraz obiektywu jest ściśle powiązany z wysokością lotu, która przekłada się na wielkość piksela terenowego. Przy zadanej wartości piksela, wysokość lotu rośnie proporcjonalnie do długości obiektywu i rozmiarów matrycy.
Na koniec pozostaje dobranie pokrycia podłużnego (wielkość nakładania się kolejnych zdjęć w szeregu) i poprzecznego zdjęć (wielkość nakładania zdjęć pomiędzy szeregami). Pokrycie zależy od końcowego produktu – jeśli ma to być tylko ortofotomapa, wystarczy 70% podłużnego i 50% poprzecznego. Jeżeli dodatkowo mamy otrzymać precyzyjny model terenu, koniecznie jest zwiększenie pokrycia nawet do 80%/80%.

Planowanie misji fotogrametrycznej w programie Mission Manager

Fotopunkt
Kolejnym etapem w procesie wytwarzania ortofotomapy jest założenie osnowy fotogrametrycznej (fotopunktów) na terenie opracowania. Jest to szczególny rodzaj osnowy geodezyjnej dedykowany do nalotów fotogrametrycznych. Polega on na wyznaczeniu i pomiarze w terenie punktów, które będą jednoznacznie identyfikowalne na zdjęciu lotniczym. W praktyce maluje się je białą farbą lub wybiera włazy studni uzbrojenia terenu. Pomiar fotopunktów następuje przy użyciu technik geodezyjnych.
Mając plan lotu i założoną osnowę można wykonać nalot fotogrametryczny. W tym miejscu należy odejść nieco od geodezji i zwrócić się w stronę lotnictwa. Wykonując loty bezzałogowym statkiem latającym, operujemy w przestrzeni powietrznej, która tak jak ruch lądowy, rządzi się swoimi prawami. Jest nawet nieco trudniej, bo oprócz zakrętów, zmieniamy również wysokość. I to z nią wiążą się najważniejsze zasady ruchu lotniczego. Przestrzeń powietrzna podzielona jest na strefy kontrolowane i niekontrolowane.
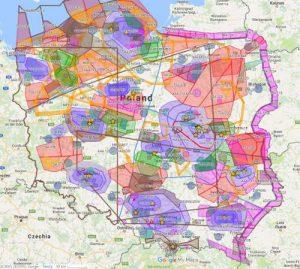
Mapa stref lotniczych w Polsce
W niekontrolowanych można wykonywać loty bez dodatkowych procedur, należy jedynie czynnie obserwować niebo. W tych kontrolowanych istnieją obszary, w których można latać po uprzednim kontakcie z zarządzającym, takie, które wymagają specjalnego pozwolenia po przedłożeniu stosownych pism, oraz takie, w których loty są zabronione. Ponieważ bezzałogowiec jest na samym końcu w hierarchii pierwszeństwa, przed wylotem konieczne jest sprawdzenie przestrzeni powietrznej nad terenem opracowania.
Jeśli przestrzeń jest wolna, pozostaje nam dobranie odpowiedniego lądowiska i wykonanie nalotu. Przygotowanie UAV i realizacja lotu to oddzielna procedura, o której więcej dowiecie się tutaj.
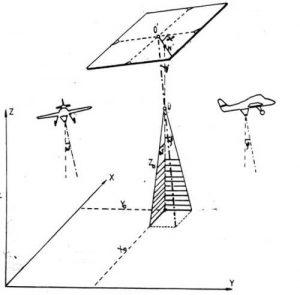
Elementy orientacji zewnętrznej zdjęcia. (źródło J. Bernasik „Wykłady z fotogrametrii i teledetekcji”)
Po wykonanym nalocie fotogrametrycznym otrzymujemy zdjęcia oraz dane z GPS i IMU (ang. inertial measurement unit), informujące nas o miejscu wykonania zdjęcia oraz kątach wychyleń aparatu w trzech osiach. W fotogrametrii dane te nazywają się elementami orientacji zewnętrznej zdjęcia (EOZ). Następnie pozyskane dane poddawane są obróbce w przystosowanym do tego oprogramowaniu*.
Matching, czyli automatyczne wyszukiwanie punktów wiążących (odpowiadających sobie) na dwóch (lub więcej) zdjęciach jest pierwszym etapem cyfrowej obróbki. To nic innego jak wykrywanie tego samego punktu na różnych zdjęciach. Programy takie jak AgiSoft Photoscan, Pix4D, 3D Survey wykorzystują rożne algorytmy do tego zadania. Żeby matching był skuteczniejszy i szybszy warto wprowadzić parametry kalibracji kamery, czyli elementy orientacji wewnętrznej, w skrócie EOW. Należą do nich długość ogniskowej (stała kamery), współrzędne punktu głównego w układzie zdjęcia oraz wielkość piksela matrycy i dystorsja. Parametry te należy pozyskać ze świadectwa kalibracji, lub jeśli takiego nie posiadamy, wprowadzić wartości przybliżone. Ponadto proces ten jest szybszy, jeśli posiadamy dokładne EOZ, np. z dodatkowego odbiornika GPS na pokładzie drona. Po przeprowadzeniu matchingu otrzymujemy rzadką chmurę punktów wiążących. Następnym etapem jest aerotriangulacja połączona z autokalibracją kamery.
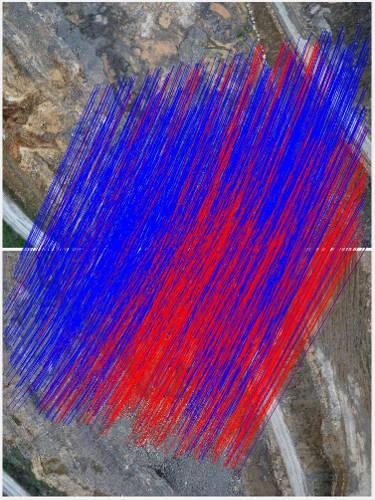
Punkty wiążące, matching (źródło własne)
Aerotriangulacja to proces oparty o równanie kolinearności. W skrócie to wielokrotny (iteracyjny) proces matematyczny, w którym wyznaczane są dokładnie elementy orientacji zewnętrznej (EOZ – miejsce wykonania zdjęcia w przestrzeni). Proces ten nie byłby możliwy, gdyby nie punkty wiążące i fotopunkty. Na ich podstawie rozwiązywane są równania z niewiadomymi. Dzięki punktom wiążącym łączone są wzajemnie zdjęcia, a dzięki fotopunktom możemy osadzić przyszły model w konkretnym układzie współrzędnych.
Aerotriangulacja połączona jest z autokalibracją kamery. W tym procesie wyznaczane są precyzyjnie elementy orientacji wewnętrznej (EOW), czyli stała kamery, punkt główny zdjęcia oraz dystorsja. Oczywiście najlepiej jest używać kamer z predefiniowanymi EOW, czyli posiadającymi świadectwa kalibracji, inaczej kamer metrycznych. Jednak póki bezzałogowce używają kamer niemetrycznych (aparatów fotograficznych), proces autokalibracji jest konieczny. W innym przypadku należałoby wykonywać kalibrację po każdym lądowaniu (ze względu na niestałość elementów konstrukcyjnych aparatów fotograficznych).
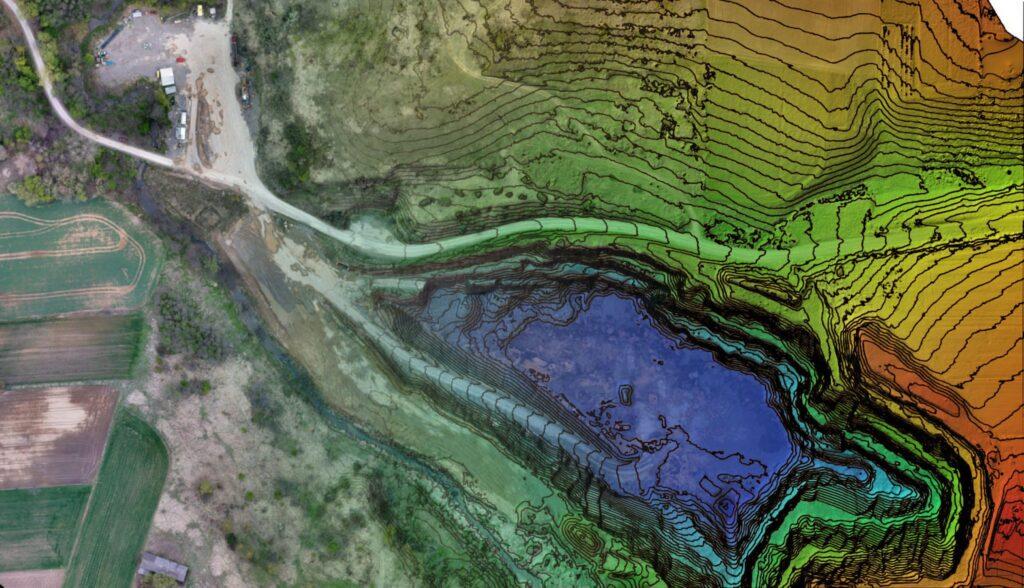
Znając dokładnie miejsca wykonania zdjęć w przestrzeni oraz ich wzajemną orientację, możemy przejść do budowania numerycznego modelu terenu (NMT). Precyzyjnie rzecz ujmując, w przypadku pracy tylko na zdjęciach jest to numeryczny model pokrycia terenu (NMPT), ponieważ nie ma tak dokładnej możliwości rozróżnienia między roślinnością, gruntem a zabudowaniami, jak ma to miejsce przy technologii LIDAR.
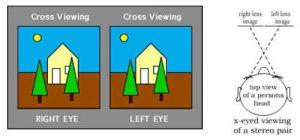
Sztuczny efekt stereoskopowy (źródło www)
Ale jak to możliwe, że z płaskich zdjęć otrzymujemy model 3D? Za wszystko odpowiada efekt stereoskopowy. Dokładnie tak jak w filmach 3D, dzięki dwóm minimalnie przesuniętym obrazom tej samej rzeczy (widać to w kinie, kiedy ściągniemy okulary), mamy wrażanie jakby „wystawała” z ekranu, a my możemy ją „złapać”. Programy do obróbki zdjęć „łapią wystające elementy i zapamiętują ich położenie”. Algorytm przetwarza w ten sposób wszystkie zdjęcia, tworząc numeryczny model terenu.

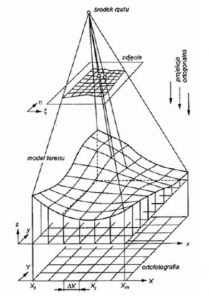
wpływ deniwelacji terenu na skalę zdjęcia (źródło www)
Dopiero teraz możemy wrócić do ortofotomapy. Od zwykłego zdjęcia odróżnia ją fakt kartometryczności, czyli gwarancji, że możemy wykonywać na niej pomiary długości czy powierzchni z określoną, wysoką dokładnością. Zdjęcia lotnicze stają się ortofotomapą po procesie ortorektyfikacji. Do niego niezbędny jest numeryczny model terenu. Ponieważ zwykłe zdjęcie nie uwzględnia zmiany wysokości, obarczone jest błędem skali. Proces ortorektyfikacji polega na „naciągnięciu” zdjęcia na model terenu, inaczej, zamianie rzutu środkowego na rzut ortogonalny.
Na koniec pozostaje mozaikowanie, czyli połączenie wielu zdjęć w jedną pełnowartościową ortofotomapę.
Należy pamiętać, że nie każde opracowanie zdjęć z drona będzie ortofotomapą. Tylko przestrzeganie jasno określonych i rygorystycznych reguł pozwoli osiągnąć pełnowartościowy, geodezyjny produkt.
*proces opisany na przykładzie programu AgiSoft.
Kamil Kaczorowski
Porozmawiajmy o Twoim projekcie.
Wypełnij poniższy formularz, a skontaktujemy się z Tobą najszybciej, jak to możliwe.