Obecnie montuje się na pokładach dronów dodatkowe odbiorniki GPS, co pozwala ograniczyć te prace do minimum. Więcej o tym oraz o samych dokładnościach tutaj.
Fotopunkty należy zastabilizować i pomierzyć możliwie najkrócej przed nalotem. A to ze względu na możliwe uszkodzenia. Oczywiście dopuszcza się zmianę ich położenia po uwzględnieniu warunków terenowych, niemniej należy zachować spójność całego układu. To również czas na weryfikację założonych lądowisk oraz zakresu poszczególnych misji. Pomiar osnowy fotogrametrycznej jest etapem pośrednim pomiędzy planowaniem a wykonaniem nalotu.
Jak zaplanować i wykonać nalot fotogrametryczny dronem?

Zakres opracowania – obiekt liniowy (u góry) i zwarty (na dole)
Gwałtowny rozwój technologii bezzałogowych przyczynił się do popularyzacji opracowań z dziedziny fotogrametrii niskiego pułapu. Jednak czy wszystkie prace stworzone za pomocą drona są pełnowartościowymi produktami geodezyjnymi? W tym artykule opiszemy jak wygląda pierwszy etap każdego zlecenia – nalot fotogrametryczny przy użyciu UAV, na podstawie którego tworzymy ortofotomapy, numeryczne modele terenu oraz inne produkty znajdujące zastosowanie w wielu branżach m. in. budownictwie drogowym, leśnictwie, rotlnictwie precyzyjnym czy monitorowaniu wyrobiska górniczego.
Zagadnienie przedstawiono na przykładzie aplikacji MissionManager firmy FlyTech UAV, polskiego producenta systemów bezzałogowych.
Wszystko zaczyna się na etapie planowania nalotu fotogrametrycznego. Z reguły punktem wyjścia jest otrzymany zakres od zamawiającego. Na jego podstawie dobieramy odpowiedniego bezzałogowca. Decyduje o tym przede wszystkim obszar, ale również dostępność lądowisk. W przypadku pojedynczych małych obiektów (hałd, składowisk, budynków czy budowli inżynierskich) najlepiej będzie wykorzystać wielowirnikowiec. Gdy mamy do czynienia z dużymi obszarami, rozsądniej będzie korzystać z płatowca. Są wyjątki w postaci dużego terenu zabudowanego (np. zakłady przemysłowe), gdzie wybranie odpowiedniego lądowiska dla samolotu jest niemożliwe, wtedy nalot należy zrealizować wielowirnikowcem. Z kolei na małych obszarach, gdzie upadek multirotora mógłby spowodować duże szkody, zdecydujemy się na płatowiec.
Szeroka oferta Colidrone
Masz pytania? Skontaktuj się z nami!
Gdy już wybraliśmy platformę, należy wyznaczyć potencjalne lądowiska. Dostępne w aplikacji serwisy mapowe ze zdjęciami satelitarnymi dają dużą wygodę pod tym względem. Ważne jest, aby wyznaczyć ich możliwie dużo. A to dlatego, że planując nalot wcześniej nie wiemy jakie będą panować warunki meteorologiczne (głównie kierunek wiatru) oraz czy to co wygląda na zdjęciu jak ładna łąka, nie okaże się polem kukurydzy. W skrócie, należy uwzględnić aktualność zdjęć. Dodatkowym czynnikiem jest ukształtowanie terenu. Należy na nie zwrócić szczególną uwagę w terenach górskich, gdzie nachylenia gruntu mogą wyeliminować potencjalne lądowisko. Ponadto deniwelacja terenu wpływa na lokalne ruchy powietrza, takie jak prądy zstępujące, wstępujące oraz turbulencje i zawirowania. Zawsze należy lądować „pod wiatr” i „pod górkę”. Mając dostatecznie dużo możliwych lądowisk, możemy później w terenie dowolnie konfigurować pojedyncze misje.

Planowanie parametrów lotu UAV: piksel terenowy, wysokość lotu, pokrycie poprzeczne i podłużne
Następnym krokiem jest dobór parametrów lotu (wysokość lotu oraz odstępy między kolejnymi szeregami). Zależą one od końcowego produktu i charakterystyki terenu. Z kolei te warunkują dobór odpowiedniego obiektywu, wielkość piksela terenowego oraz pokrycie podłużne i poprzeczne zdjęć. Póki w dronach używane są kamery niemetryczne (czyli takie, w których nie jest zachowana stałość elementów orientacji wewnętrznej kamery), należy poświęcić wiele uwagi temu etapowi, aby finalny produkt mógł dorównać opracowaniom klasycznej fotogrametrii lotniczej.
W pierwszym kroku musimy wiedzieć, czemu ma służyć końcowy produkt. Jeśli potrzebna jest tylko poglądowa ortofotomapa, możemy pozwolić sobie na mniejsze pokrycie podłużne i poprzeczne zdjęć (rzędu 70% / 40%). Jeśli opracowaniem ma być dokładna ortofotomapa (a czasami tzw. true orthophoto) w połączeniu z numerycznym modelem terenu, należy zwiększyć pokrycie nawet do 85% / 85%. Wynika to z faktu, że w przypadku wykorzystania dronów model terenu powstaje na bazie zdjęć, a ten jest mało precyzyjny, gdy zmniejszymy pokrycie. O tym, jak powstaje ortofotomapa i NMT możecie przeczytać tutaj. O wyborze pokrycia decyduje również ukształtowanie terenu. Im większe deniwelacje lub gęstsza zabudowa tym pokrycie powinno być większe.

Dobór parametrów lotu UAV i zaprogramowanie ścieżki lotu
Równolegle wybieramy wielkość piksela terenowego. Im piksel mniejszy tym ortofotomapa będzie czytelniejsza, a pozyskany numeryczny model terenu dokładniejszy. Ponadto piksel terenowy w połączeniu z ogniskową obiektywu determinuje wysokość lotu.
Gdy zdecydujemy się na pokrycie i piksel, należy wybrać obiektyw. I tutaj znów głównym wyznacznikiem jest dokładność produktu końcowego oraz ukształtowanie terenu. Szerokokątny obiektyw („krótki”, ogniskowa rzędu 20 mm i mniej) pozwala na obniżenie lotu
i pokrycie większego obszaru jednym zdjęciem, ale też może zwiększyć błędy ze względu na dystorsję. Nie jest zalecany tam, gdzie deniwelacje terenu są duże, ponieważ fałszuje skalę zdjęcia. W przypadku pozyskiwania precyzyjnych danych stosuje się wąskie obiektywy
( f=40 mm i więcej). Na tym etapie należy również zwrócić uwagę na przeszkody terenowe oraz ograniczenia w przestrzeni powietrznej. Wysokie budowle (kominy, maszty itp.) mogą stanowić przeszkodę przy niskim locie, natomiast strefy lotnicze mogą ograniczać wysokość lotu od góry (np. w rejonach lotnisk, gdzie dopuszcza się loty bezzałogowców do 100 metrów nad poziom gruntu).
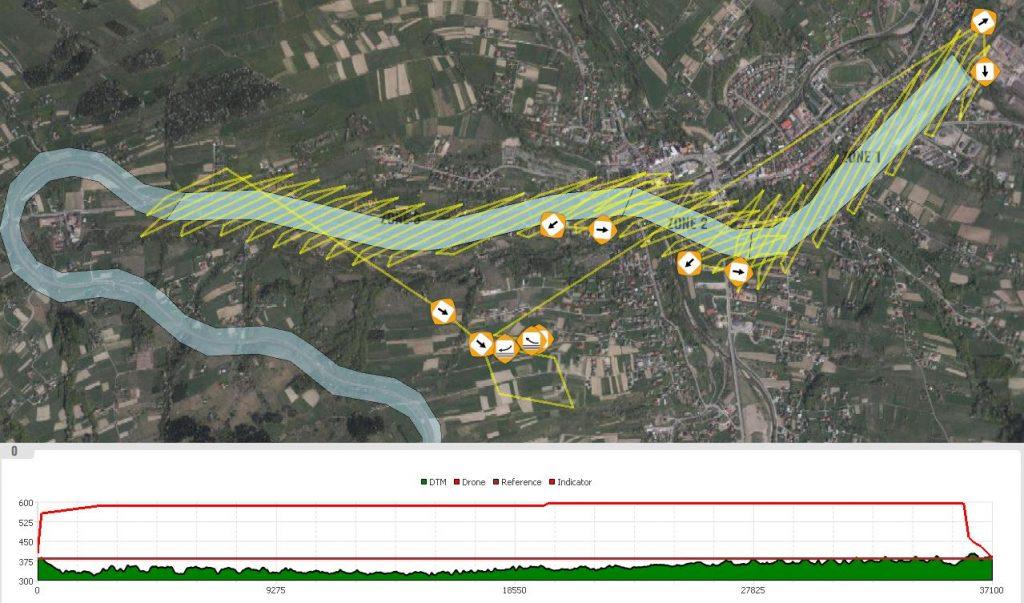
Wykres pozwalający na wykrycie przeszkód terenowych na ścieżce lotu
Jak widać, planowanie nalotu fotogrametrycznego to szereg bardzo ważnych, powiązanych czynności. Poszczególne parametry wpływają na siebie wzajemnie, tak że podczas planowania musimy zwracać uwagę na każdy z nich.
Osnowa fotogrametryczna

Przykładowy fotopunkt
Jeśli chcemy, aby nasze opracowanie było pełnowartościowym produktem geodezyjnym, musimy założyć tzw. osnowę fotogrametryczną. To szczególny rodzaj osnowy geodezyjnej, przeznaczonej do nalotów fotogrametrycznych, potocznie zwanej fotopunktami. Różni się ona od tej klasycznej sposobem stabilizacji oraz sygnalizacji. Musi być przede wszystkim dobrze widoczna na zdjęciu lotniczym. Dlatego do sygnalizacji fotopunktów stosuje się kontrastujące maty, lub maluje się je specjalną farbą. Kształt znacznika ma zapewniać jasną interpretację centra (miejsca pomiaru) na zdjęciu. Przez lata praktyki wykształciły się wzory spisane w instrukcjach oraz rozporządzeniach. Czasami wykorzystuje się również jasno identyfikowalne obiekty naziemne, takie jak studzienki kanalizacyjne czy punkt centralny ronda. Wszystko zależy od skali opracowania.
Osnowa fotogrametryczna podlega pomiarowi geodezyjnemu. Tylko w taki sposób możemy osiągnąć centymetrowe dokładności końcowych produktów.
Mając już określone wszystkie parametry nalotu, należy zaprojektować osnowę. Pod uwagę trzeba wziąć obszar opracowania oraz jego kształt. Ponieważ końcową dokładnością rządzą zależności geometryczne, fotopunkty muszą być rozmieszczone równomiernie, a w przypadku obiektów liniowych należy je dodatkowo zagęścić. Część punktów osnowy przeznacza się na punkty kontrolne, tzn. takie, których nie włącza się do końcowego wyrównania. Zatem zaprojektować należy więcej punktów.
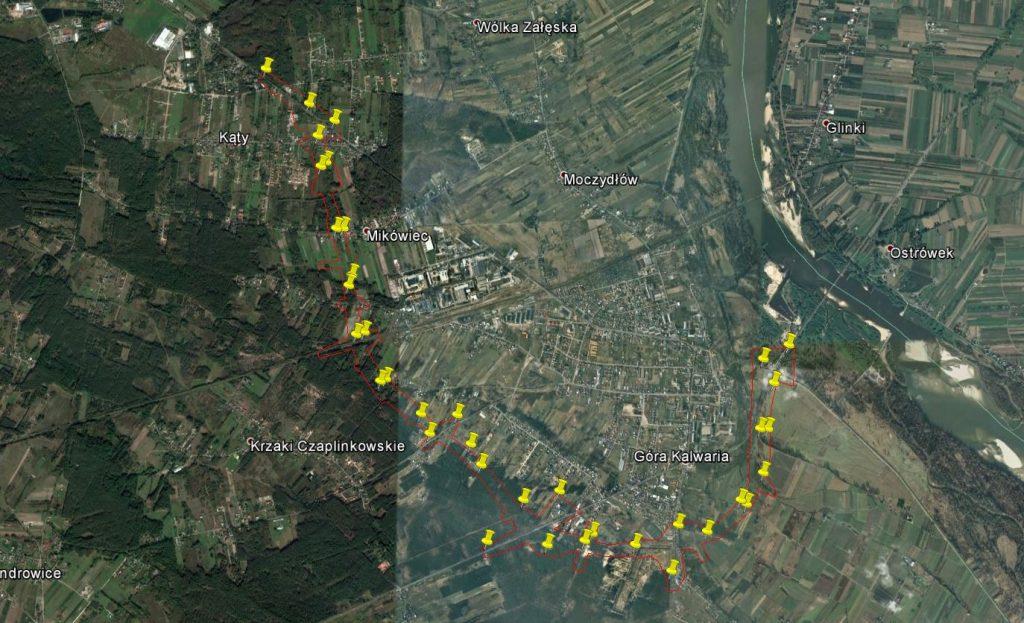
Równomierne rozmieszczenie fotopunktów w zakresie nalotu
Nalot fotogrametryczny
Czas wykonania nalotu determinują warunki meteorologiczne. Realnie możemy planować na trzy dni do przodu, biorąc po uwagę prawdopodobieństwo prognoz. Jeśli występuje odpowiednie okno pogodowe, możemy przystąpić do realizacji. Dzień przed należy dokładnie sprawdzić platformę i przygotować ją do lotu. Każdy dron ma swoją specyfikę, tutaj zagadnienie przedstawiono na przykładzie bezzałogowego systemu fotogrametrycznego Fenix produkcji FlyTech UAV.

Podczas lotu należy cały czas obserwować wskazania telemetrii
W terenie przyjeżdżamy na zweryfikowane lądowisko. W aplikacji dokonujemy ewentualnych korekt misji uwzględniając wybrane miejsce, kierunek wiatru, zasięg lotu, rozkład fotopunktów oraz różnice wysokości między lądowiskiem a terenem objętym nalotem.
Przez radiomodem łączymy się z płatowcem i wgrywamy misję fotogrametryczną. Następnie przechodzimy przez procedurę startową, obejmującą kontrolę wszystkich mechanizmów. Sprawdzane są serwomechanizmy sterujące, ogólny stan kadłuba i skrzydeł, silnik główny, stabilizacja i działanie sensorów, wskazania telemetrii oraz poprawność zbierania obserwacji GNSS (GPS + GLONASS). Gdy mamy pewność, że wszystko działa poprawnie, możemy wystartować.
UAV lata w pełni autonomicznie, jednak należy cały czas monitorować wskazania aparatury. Na tym etapie prac najważniejsze jest bezpieczeństwo. Należy przestrzegać ściśle określonych zasad wykonywania lotów spisanych w prawie lotniczym.
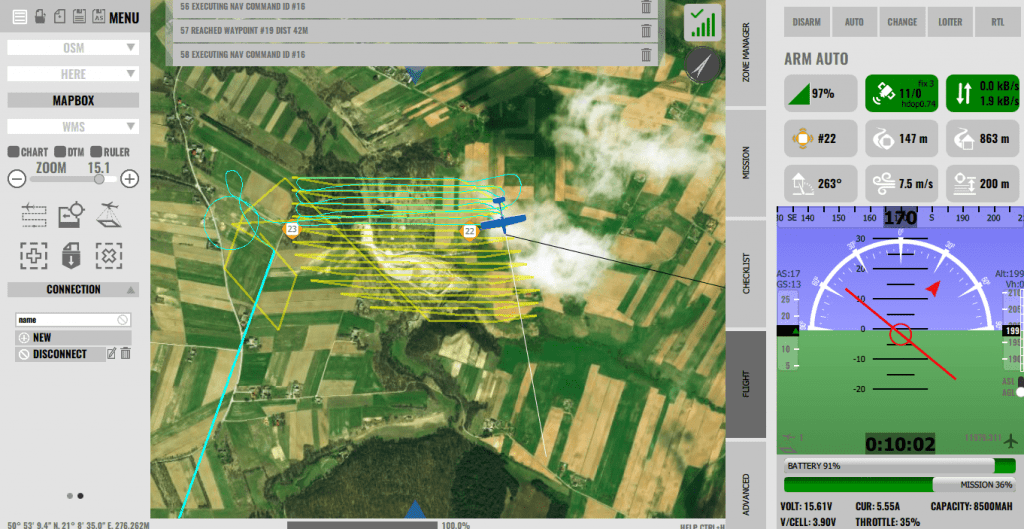
Podczas lotu należy cały czas obserwować wskazania telemetrii
Niemal w każdym przypadku (ze względu na obecny stan prawa) wykonuje się loty w zasięgu wzroku (VLOS). To znaczy, że cały czas musimy obserwować drona i mieć możliwość zareagowania na sytuacje awaryjne. Zasady ruchu i wykonywania lotów w przestrzeni powietrznej to osobne bardzo obszerne zagadnienie. Upraszczając do celów niniejszego tekstu, należy pamiętać, że bezzałogowiec operujący w wolnej przestrzeni powietrznej, musi ustąpić pierwszeństwa wszystkim innym statkom załogowym oraz spadochroniarzom, motolotniom itp. Należy również zachować separację od zabudowań oraz osób przebywających na ziemi. Dlatego korzystnie jest, kiedy nad lotem czuwają dwie osoby: operator UAV oraz obserwator.
Najkorzystniej jest, kiedy kierunek lotu jest prostopadły do kierunku wiatru (co zapewnia stalą prędkość względem ziemi) a start i lądowanie odbywa się pod wiatr. Zmienić to może charakterystyka obiektu (liniowe, np. drogi, koleje) oraz warunki terenowe (lądowiska).
Podczas lotu najważniejszymi wskazaniami są: stan baterii oraz prędkość względem powietrza. Jeśli te dwie wartości odbiegają od założonych, znaczy to, że z dronem dzieje się coś niepożądanego. Wtedy do dyspozycji mamy inne wskazania takie jak: pobór prądu, widoczność satelitów do nawigacji czy wychylenia samolotu w trzech osiach. Na każdą kryzysową sytuację należy natychmiast reagować. Aby minimalizować ryzyko, bezzałogowce wyposażone są w szereg systemów zabezpieczających. Polegają one na różnych trybach sterowania oraz automatycznym powrocie do miejsca startu.
Misja kończy się lodowaniem. System Fenix może to wykonać autonomicznie, jednak w praktyce rzadko warunki terenowe na to pozwalają. Wynika to z dość dużego kręgu podejścia jaki wykonuje samolot. A ten uwzględnia spory zapas przestrzeni na wypadek niekorzystnego wiatru. W takim przypadku teren wokół lądowiska musi być wolny od wysokich przeszkód. Operator lądując manualnie na bieżąco może korygować lot i w efekcie wylądować na dużo mniejszym terenie.
Po wykonanym locie sprawdzamy poprawność zebranych danych i w zależności od warunków, przemieszczamy się na kolejne lądowisko lub przygotowujemy drona do kolejnej misji.

Podejście UAV do lądowania
Biorąc pod uwagę polskie prawo oraz zasięg płatowca, w ciągu jednego dnia możemy wykonać od 4 do 8 misji, co przekłada się nawet na kilkanaście kilometrów kwadratowych opracowania. Wszystko zależy od kształtu obiektu oraz parametrów lotu. Pojedyncza trwa ok, 50 min, a w jej trakcie samolot pokonuje średnio 40-50 km.
Jak widać loty fotogrametryczne bezzałogowym statkiem powietrznym to szereg precyzyjnych procedur. Od planowania przez pomiar osnowy do samego lotu. Pomimo że operator stoi na ziemi, nie można zapominać, że dron porusza się w przestrzeni powietrznej, którą często dzieli z innymi uczestnikami. Dlatego procedury są kluczowe dla bezpieczeństwa. W przypadku nalotów fotogrametrycznych stosowanie procedur zapewnia również poprawność pozyskania danych.
Kontakt
Porozmawiajmy o Twoim projekcie.
Wypełnij poniższy formularz, a skontaktujemy się z Tobą najszybciej, jak to możliwe.