Po co w dronie RTK? Czy montowanie w bezzałogowcach odbiorników RTK istotnie zwiększa dokładność wynikowych danych fotogrametrycznych?

A może to tylko zbędny i kosztowny gadżet? Odpowiedź przynoszą testy wykonane przez polskiego producenta dronów – firmę FlyTech UAV z Krakowa.
Budowa systemu Fenix RTK
W podstawowej konfiguracji, w której wykonywano opisane tu testy dokładnościowe, system bazuje na dwóch jednoczęstotliwościowych odbiornikach RTK GPS + GLONASS. Pierwszy spełnia funkcję odbiornika bazowego. Drugi zamontowany jest natomiast na pokładzie samolotu i jest bezpośrednio połączony z aparatem fotograficznym. W ten sposób w pliku obserwacyjnym rejestrowany jest moment wyzwolenia zdjęcia. Obydwa odbiorniki pracują w trybie PPK (Post Processing Kinematic): rejestrują surowe dane obserwacyjne, które następnie poddawane są postprocessingowi.

Ponieważ obserwacje te są domyślnie zapisywane w otwartym formacie RINEX, do dalszego opracowania nie jest potrzebne komercyjne oprogramowanie, a obliczenia mogą być wykonane na przykład w open source’owej aplikacji RTKLib. Dodatkową zaletą pracy w trybie PPK jest możliwość wykonania obliczeń z filtrem kombinowanym (w przód i wstecz), co zwiększa skuteczność utrzymania rozwiązania typu fix.
We wszystkich przeprowadzonych dotychczas testach Fenixa w opisanej konfiguracji skuteczność utrzymania rozwiązania typu fix nie spadła poniżej 95%. Pokazuje to, że w zastosowaniach fotogrametrycznych odbiornik jednoczęstotliwościowy z powodzeniem spełnia swoje zadanie. Problemy z jego wykorzystaniem pojawiają się bowiem przede wszystkim przy długim wektorze między bazą a samolotem. W przypadku lotów w zasięgu wzroku (VLOS) wartość ta zazwyczaj nie przekracza jednak 1,5 km. Ponadto odbiornik jednoczęstotliwościowy jest kilkakrotnie tańszy od rozwiązań dwuczęstotliwościowych.
Warto również zwrócić uwagę, że w analizowanym przypadku jako instrument bazowy może zostać wykorzystany dowolny sprzęt GNSS, który umożliwia zapis surowych plików obserwacyjnych z opcją konwersji do formatu RINEX.
Szeroka oferta Colidrone
Masz pytania? Skontaktuj się z nami!
Po co w dronie RTK?
Bezzałogowe statki latające (UAV) mają szerokie spektrum zastosowań i coraz częściej wykorzystywane są także przez geodetów. Aby zaspokoić rosnące wymagania rynku geodezyjnego, oczekującego przede wszystkim wysokiej dokładności i efektywności pomiaru, w bezzałogowcach montowane są systemy precyzyjnego pozycjonowania GNSS – najczęściej odbiorniki RTK.
Z jednej strony mają one ograniczyć liczbę fotopunktów, a tym samym przyspieszyć pomiar. Z drugiej strony zwiększają spójność pozyskiwanych danych, co przekłada się na poprawę dokładności finalnego produktu. Kluczowe pozostaje jednak pytanie, czy różnica jest na tyle duża, że będzie warta wyłożenia dodatkowych pieniędzy na sprzęt?
W locie zamiast w terenie
W przypadku wykorzystania bezzałogowych maszyn latających do celów geodezyjnych zasadniczym aspektem jest dokładność końcowego opracowania – numerycznego modelu pokrycia terenu czy ortofotomapy. Związana jest ona z wieloma czynnikami, takimi jak: stabilność lotu, parametry sensora optycznego, plan nalotu (piksel terenowy, pokrycie poprzeczne/podłużne), ale przede wszystkim ze sposobem pozyskania georeferencji. W przypadku bezzałogowców dotychczas była ona pozyskiwana na podstawie fotopunktów naziemnych oraz wyrównania bloku zdjęć metodą niezależnych wiązek. Na jakość końcowego opracowania wpływa wówczas dodatkowo: gęstość i sposób rozmieszczenia fotopunktów, dokładność ich pomiaru oraz rozpoznawalność znaku na zdjęciach. Zastosowanie fotopunktów wiąże się z dodatkowymi pracami terenowymi i biurowymi. Muszą one bowiem zostać odpowiednio zamarkowane przed rozpoczęciem nalotu, następnie pomierzone, a po wykonaniu nalotu poprawnie zaznaczone na zdjęciach.
Są to najbardziej pracochłonne etapy całego opracowania, które potrafią nawet dwukrotnie wydłużyć czas realizacji zlecenia. Dodatkowo trzeba mieć na uwadze, że nieodpowiednie rozmieszczenie fotopunktów może powodować występowanie miejsc o obniżonej dokładności.
Rozwiązaniem tego problemu są systemy precyzyjnego pozycjonowania bazujące na odbiornikach RTK montowanych bezpośrednio na pokładzie UAV. Pozwalają one na pozyskiwanie informacji o georeferencji wprost, wyznaczając współrzędne środków rzutów z dokładnością do kilku centymetrów. Dzięki temu na etapie wyrównania zdjęć metodą niezależnych wiązek są one traktowane analogicznie do fotopunktów, a tym samym zwiększają nadliczbowość obserwacji. Bezpośrednio przekłada się to na poprawę spójności i dokładności całego opracowania. W ten sposób możliwe jest wykonywanie ortofotomapy i numerycznych modeli pokrycia terenu z dokładnością kilku centymetrów, i to bez użycia fotopunktów.
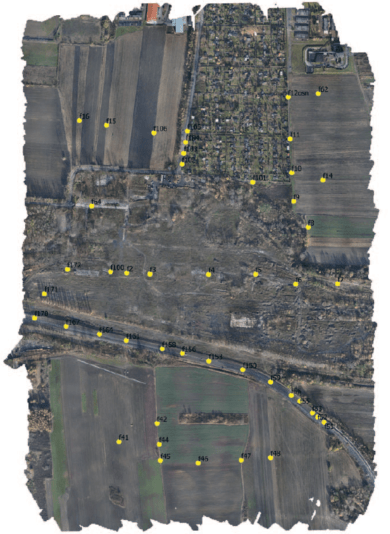
Obszar testowy oraz lokalizacja fotopunktów
Metodologia testu
W ramach prac badawczych firma FlyTech UAV przeprowadziła pomiar testowy, którego celem było wyznaczenie parametrów dokładnościowych uzyskiwanych dzięki precyzyjnemu pozycjonowaniu GNSS. Wykorzystano w nich własnego bezzałogowca Fenix wyposażonego w odbiornik RTK (patrz ramka). Nalot wykonano w listopadzie 2016 r. na terenie Piekar Śląskich i objął on obszar około 1,2 km2, na którym rozmieszczono 46 punktów kontrolnych.
Podstawowym założeniem testu było jak najwierniejsze odzwierciedlenie typowych warunków pomiarowych. W tym celu zaplanowano nalot przy następujących parametrach:
- rozmiar piksela terenowego – 2 cm,
- pokrycie – 50% poprzeczne i 80% podłużne,
- aparat – Sony a6000 z obiektywem Voigtlander 40 mm,
- wysokość lotu – 200 m,
- prędkość przelotowa – 15-20 m/s.
Nalot został przeprowadzony przy stosunkowo wietrznej pogodzie – średnia prędkość wiatru wynosiła wówczas 8 m/s. W ciągu 50-minutowej misji wykonano 1081 zdjęć, które następnie poddano obróbce w oprogramowaniu Agisoft Photo-Scan, generując ortofotomapę oraz NMPT.
W teście szczególną uwagę poświęcono analizie wartości błędów oraz ich rozkładowi na punktach kontrolnych (niebędących fotopunktami użytymi w obróbce zdjęć) w zależności od metody pozyskania informacji o georeferencji. Ze względu na gęste i w miarę równomierne pokrycie obszaru tymi punktami wyliczone dla nich błędy można utożsamić z błędami rzeczywistymi opracowania.
Ortofoto i NMPT wykonano w dwóch głównych wariantach, tj. z wykorzystaniem współrzędnych środków rzutów pozyskanych z:
- systemu precyzyjnego pozycjonowania,
- standardowego kodowego odbiornika GPS (współrzędne użyto tylko do preselekcji par sąsiednich zdjęć, natomiast nie były stosowane przy optymalizacji parametrów orientacji i kalibracji).
Dla obu wariantów wykonano opracowania z uwzględnieniem następującej liczby fotopunktów: 1, 5, 8, 11, 15, 20 oraz 25, a także bez nich. Na tej podstawie przygotowano wykresy pokazujące, jak źródło informacji o georeferencji wpływa na dokładność końcowego opracowania.
Wszystkie dane przetworzono przy najwyższych parametrach dokładnościowych, eliminacji obserwacji odstających spośród punktów wiążących (gradual selection) oraz optymalizacji elementów kalibracji i orientacji aparatu.

Fragment testowanej ortofotomapy
Wyniki
Określając parametry dokładnościowe opracowań, nacisk położono na następujące aspekty:
- dokładność uzyskiwana bez fotopunktów oraz wpływ liczby fotopunktów na poprawę dokładności,
- dokładność wysokościowa (jako element szczególnie istotny m.in. w pomiarze objętości, a jednocześnie najbardziej wrażliwy w przypadku opracowań z UAV),
- powierzchniowy rozkład błędów świadczący o spójności opracowania.
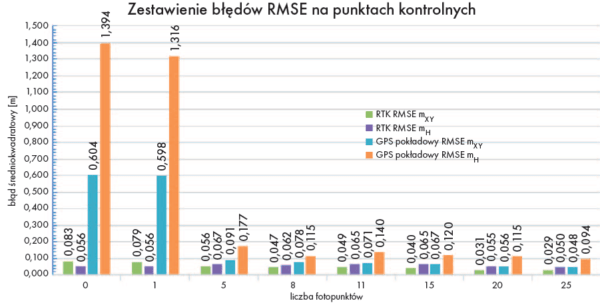
Do oceny powyższych aspektów na podstawie punktów kontrolnych przygotowano: - zestawienie średniokwadratowych błędów średnich (RMSE),
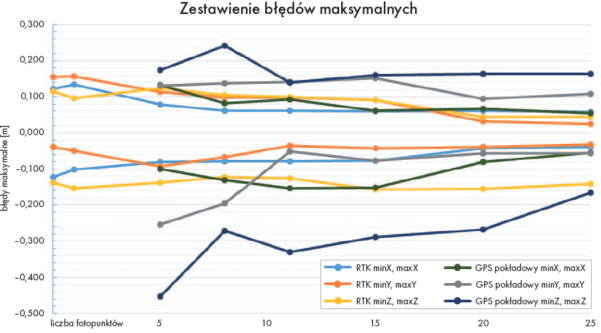
- zestawienie błędów maksymalnych,
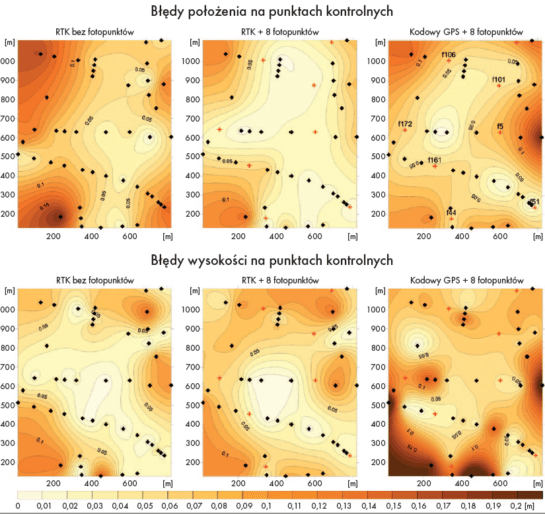
- mapy interpolacyjne błędów dla całego testowego obszaru.
Analizując wyniki, można jednoznacznie stwierdzić, że dzięki wykorzystaniu systemu precyzyjnego pozycjonowania uzyskiwane są dokładności kilkucentymetrowe bez konieczności korzystania z fotopunktów. W omawianym przypadku średniokwadratowe błędy kształtowały się na poziomie 8 cm sytuacyjnie i 6 cm wysokościowo, natomiast błędy maksymalne nie przekraczały kilkunastu centymetrów, co w świetle rozporządzenia ws. standardów technicznych wykonywania geodezyjnych pomiarów… pozwala na wykorzystywanie tego typu opracowań dla II i III grupy dokładnościowej.
Jednocześnie wytworzenie takich danych z użyciem standardowego odbiornika kodowego generowało błędy na poziomie submetrowym. Kolejnym istotnym wynikiem testu jest poprawa dokładności opracowania wraz ze wzrostem liczby fotopunktów. Wprawdzie istnieje w tym zakresie wiele opinii, ale na podstawie przeprowadzonych testów możliwe jest stwierdzenie dwóch prawidłowości.
Wnioski
Po pierwsze, niezależnie od źródła georeferencji zwiększona liczba fotopunktów przekłada się na stopniowy wzrost dokładności. Po drugie, niezależnie od liczby fotopunktów dla opracowań z wykorzystaniem RTK zarówno błędy średniokwadratowe, jak i maksymalne kształtują się na prawie dwukrotnie niższym poziomie od analogicznych opracowań wykonywanych bez RTK.
Niezwykle istotną poprawę dzięki wykorzystaniu precyzyjnego pozycjonowania możemy również zauważyć, analizując wartości błędów wysokościowych. Dzięki zastosowaniu georeferencji wprost (tj. z pomiarów RTK) średniokwadratowy błąd wysokości niezależnie od liczby fotopunktów kształtuje się na poziomie 5-6 cm, co oznacza bardzo duży zysk w stosunku do tradycyjnych opracowań, gdzie błędy te wynoszą 9-18 cm. Wyniki te są o tyle istotne, że kwestia dokładności wysokościowej opracowań z UAV jest często podawana w wątpliwość.
Idąc dalej, dzięki wykorzystaniu georeferencji wprost możemy zaobserwować bardziej jednolity rozkład błędów, czego dowodem są zamieszczone poniżej mapy interpolacyjne. Widać na nich, że przy standardowym podejściu w bezpośrednim sąsiedztwie fotopunktów (punkty czerwone) błędy faktycznie maleją, jednak nieco dalej mogą już przyjmować znacznie większe wartości.
Z tego powodu istnieje ryzyko, że przy nieodpowiednim pokryciu terenu fotopunktami i punktami kontrolnymi na naszym opracowaniu znajdą się miejsca o znacznie niższej dokładności. Z kolei w przypadku systemów precyzyjnego pozycjonowania dysponujemy informacjami o georeferencji dla całego obszaru, co przekłada się na bardziej jednorodny rozkład błędów.
Wymierne korzyści
Przeprowadzone testy dowodzą, że wykorzystanie odbiornika RTK w dronie pozwala na zmniejszenie ilości prac terenowych, co bezpośrednio przekłada się na możliwość wykonywania opracowań dla większych obszarów w krótszym czasie przy zachowaniu odpowiednich wymagań dokładnościowych.
System taki bez wątpienia znajdzie zastosowanie również przy wykonywaniu opracowań dla terenów, gdzie z istotnych względów zakładanie tradycyjnej osnowy fotogrametrycznej jest utrudnione lub niebezpieczne. Jako przykłady takich miejsc można wymienić: kopalnie odkrywkowe, hałdy przemysłowe, tereny podmokłe lub zalesione. Ponadto nie sposób pominąć korzyści płynących z poprawy spójności i dokładności standardowych opracowań wykonywanych przy użyciu bezzałogowców. Dzięki temu technologia ta staje się jeszcze bardziej niezawodna i możliwa do zastosowania w szerszym spektrum prac geodezyjnych.
Paweł Wiącek
Kontakt
Porozmawiajmy o Twoim projekcie.
Wypełnij poniższy formularz, a skontaktujemy się z Tobą najszybciej, jak to możliwe.