





Budowa dróg – inwentaryzacja z drona
Realizujemy geodezyjną obsługę inwestycji drogowych. Nowoczesna flota. Sprawdź.
Robimy zdjęcia lotnicze, korzystając z własnej floty.
Realizujemy projekty w kopalniach.
Wykonujemy np. mapy do celów projektowych.
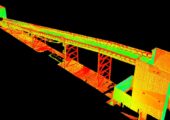
Wykorzystujemy skanowanie laserowe.
Poznaj zespół geodetów, którzy dysponują bogatą wiedzą, poświadczoną odpowiednimi uprawnieniami, a w pracy nie boją się wykorzystywać nowych technologii. Wszystko po to, by wyniki naszych pomiarów były możliwie najbardziej precyzyjne.
Pracujemy na terenie całej Polski. Możesz powierzyć nam zlecenie w każdej dziedzinie geodezji. Gwarantujemy profesjonalną i terminową realizację zamówienia.
Jesteśmy na bieżąco z nowinkami technologicznymi w geodezji i stale w nie inwestujemy. Bądź pewien dokładnych pomiarów, które zaprezentujemy zgodnie z obowiązującymi normami i najwyższymi standardami.
Pracujemy przy wymagających projektach inwestycyjnych, m.in. w branży górniczej czy przy budowie dróg. Zobacz przykłady naszych działań.

Realizujemy geodezyjną obsługę inwestycji drogowych. Nowoczesna flota. Sprawdź.

Dostarczamy pełne opracowania geodezyjne. Twoi pracownicy nie muszą iść w teren.

Szukasz wykonawcy profesjonalnej ortofotomapy? Zobacz, na co zwrócić uwagę.

Wykonujemy opracowania geodezyjne. Zobacz, co jest ważne by były one w pełni wartościowe.


Zaawansowane technologie pozwalają na dokładne pomiary w kopalniach i na terenach górniczych. Sprawdź
Porozmawiajmy o Twoim projekcie.
Wypełnij poniższy formularz, a skontaktujemy się z Tobą najszybciej, jak to możliwe.